
Le moteur
Électronique de puissance
Communication CAN-BUS:
Le bus CAN (controller Area Network) est né du besoin de trouver une solution de communication série dans les véhicules automobiles, qui ont tendance à intégrer de plus en plus de commandes électroniques. Jusqu’à maintenant, tous les organes de commandes des véhicules échangeaient les données par l’intermédiaire de lignes dédiées. L’augmentation du nombre d’organe embarqué a contraint les équipementiers automobiles a développer une nouvelle architecture à base de bus réseaux. En allemagne, Bosh a développé, au milieu des années 80, le bus CAN qui a fait l’objet d’une normalisation Iso 11898.
Avec le bus CAN, les stations ayant les mêmes droits (organes de commande, capteurs ou actionneurs) sont reliées par un bus série. Le protocole CAN de base leur permet d’échanger 2048 variables. Ce protocole, ainsi que les paramètres électriques de la ligne de transmission, sont fixés par la norme 11898. La transmission physique s’effectue soit par une paire torsadée ou par liaison infrarouge, hertzienne ou par fibre optique.
Le bus CAN par ENSEIRB (école nationale supérieure électronique, informatique & radiocommunications)
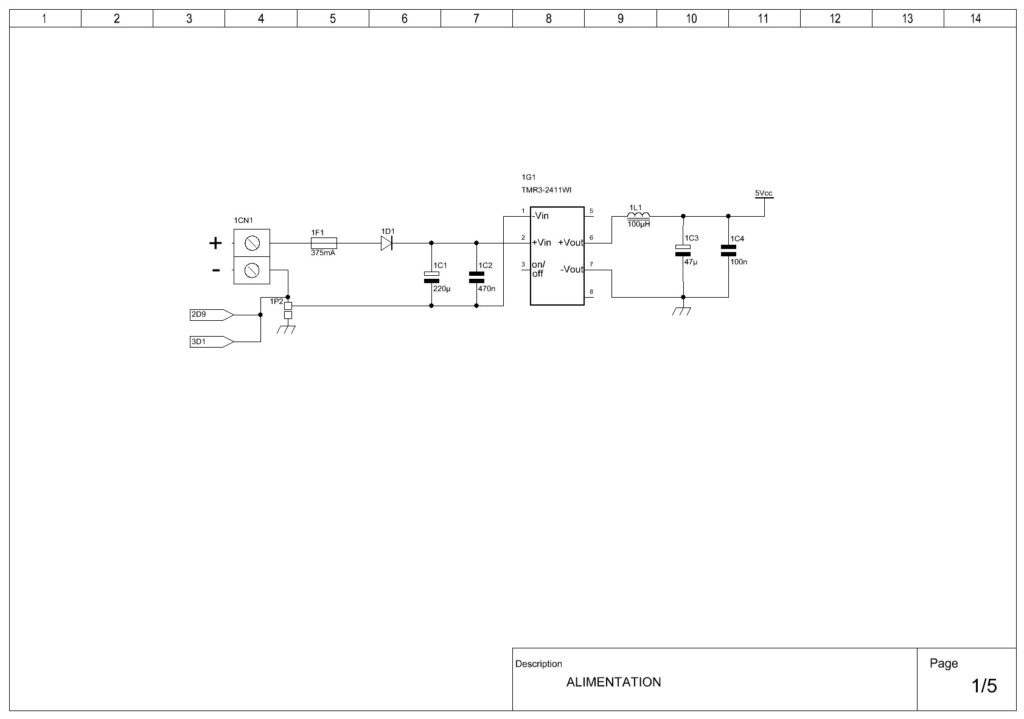
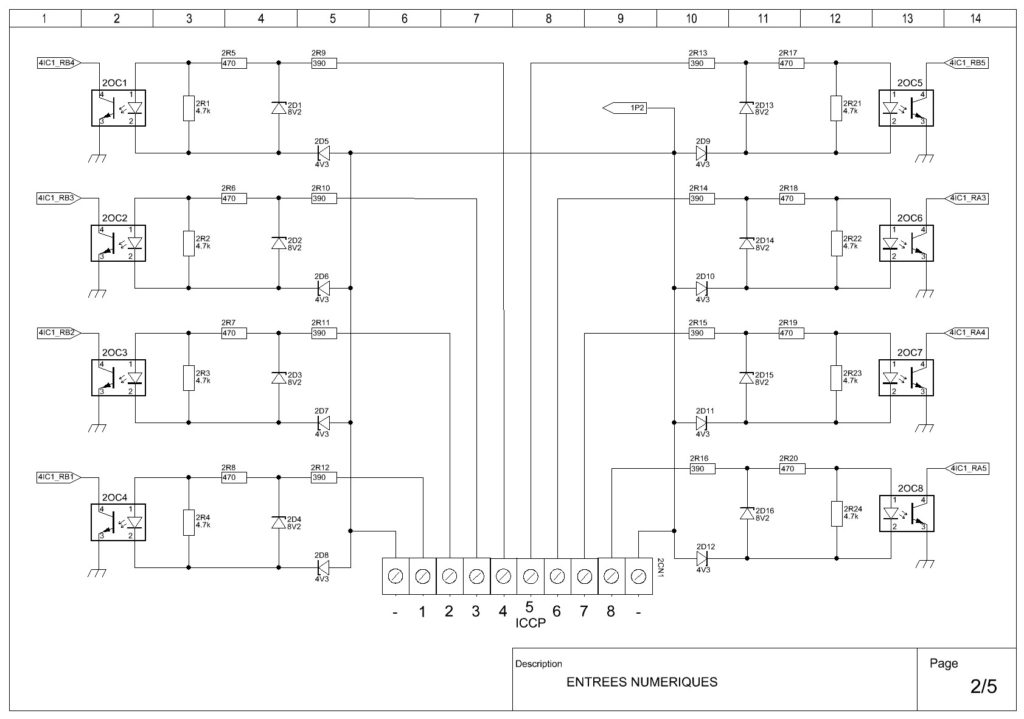
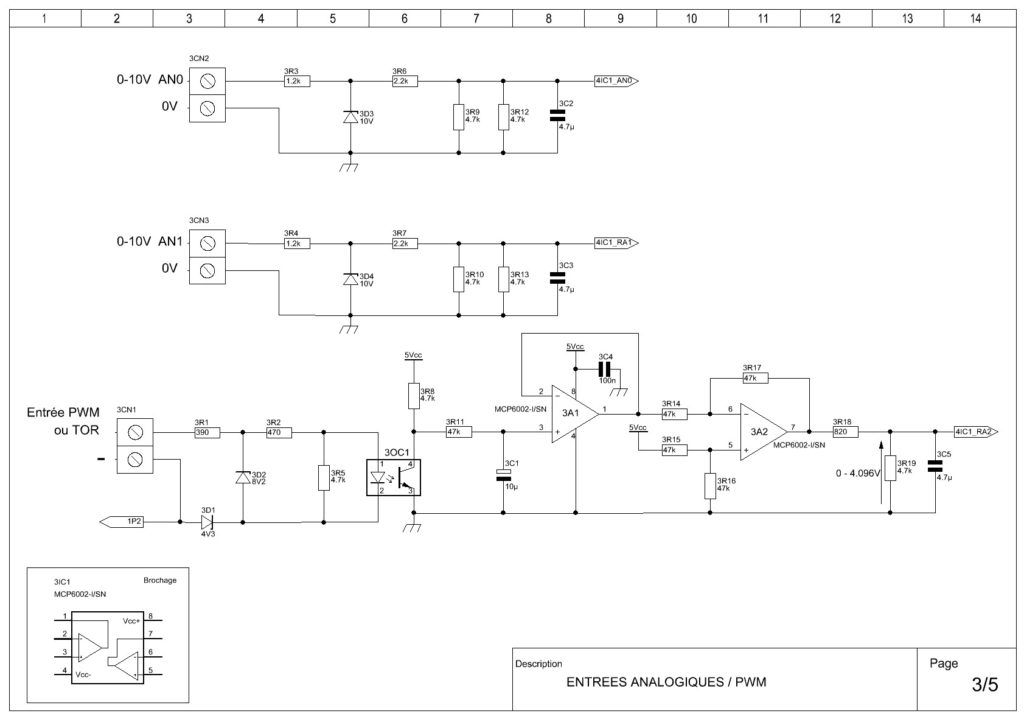
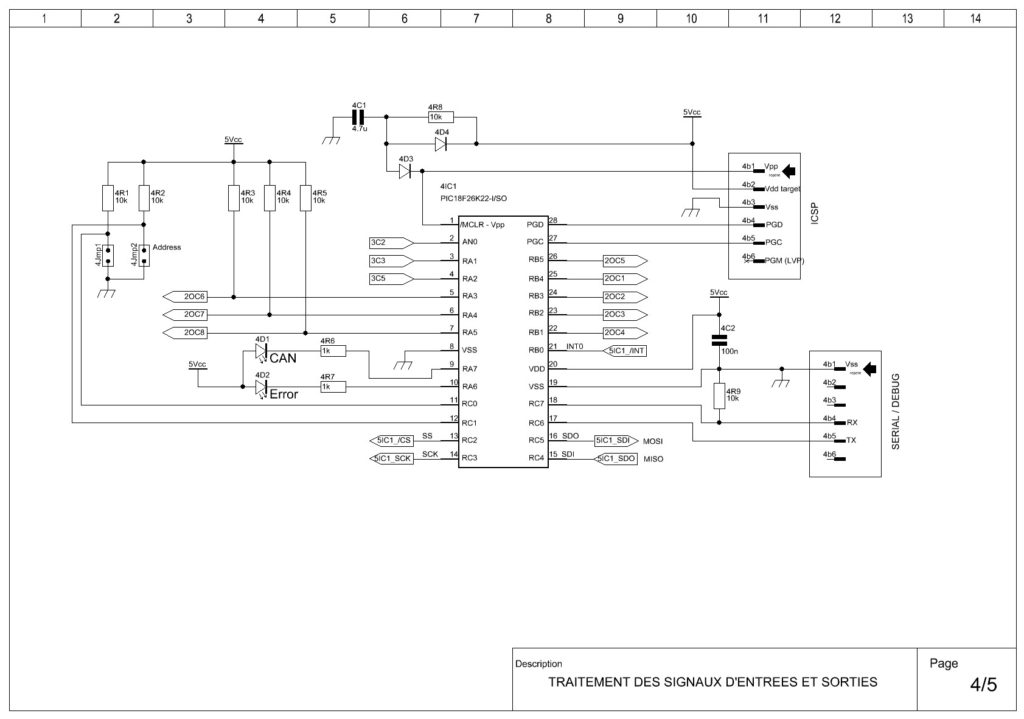
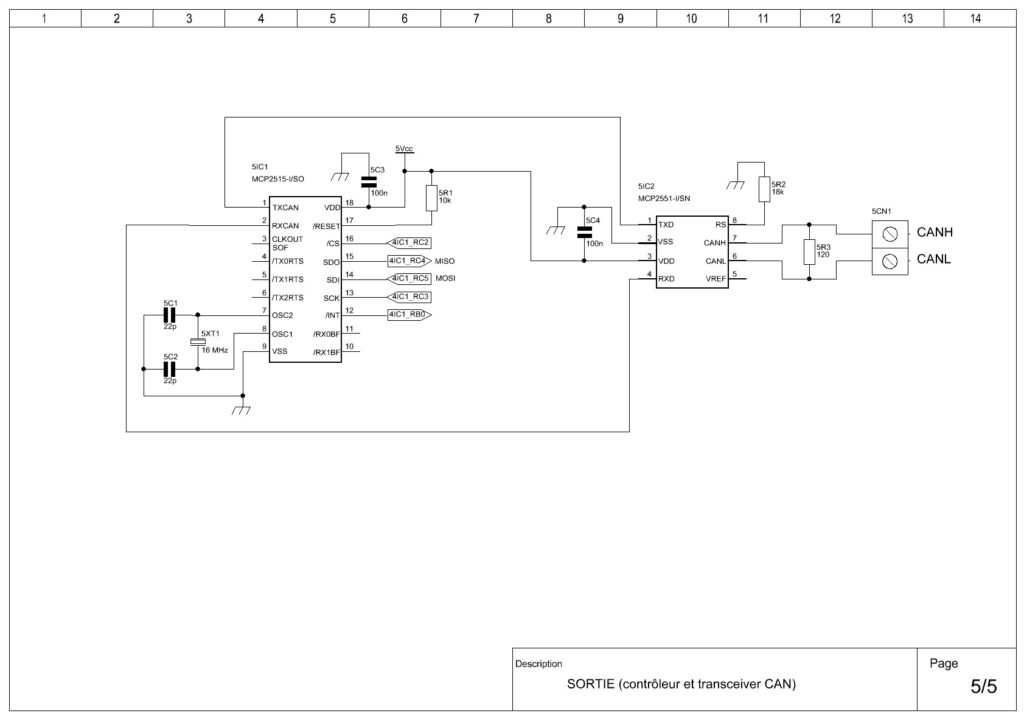
Schémas d’une carte électronique de pilotage CAN pour contrôleur de moteur à technologie brushless:
Le moteur électrique CAN à technologie brushless:
Un moteur sans balais, ou « moteur brushless », ou machine synchrone auto-pilotée à aimants permanents, est une machine électrique de la catégorie des machines synchrones, dont le rotor est constitué d’un ou de plusieurs aimants permanents et peut être pourvu d’un capteur de position rotorique (capteur à effet Hall, synchro-résolver, codeur incrémental…).
